Посильный вклад Канады в проект МКС должен быть оценен по достоинству. Пусть канадцы не делают собственных ракет, да и с космонавтами в количественном отношении они заметно отстают от остальных, зато в плане высоких технологий всё Ок. О проекте CanadArm было рассказано несколько ранее, теперь же можно поговорить о частных конструкциях.
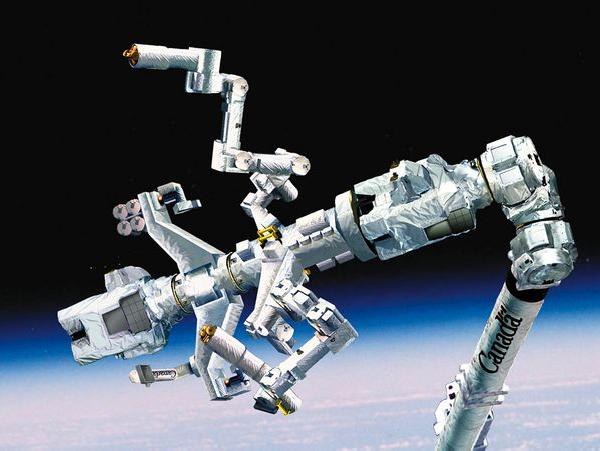
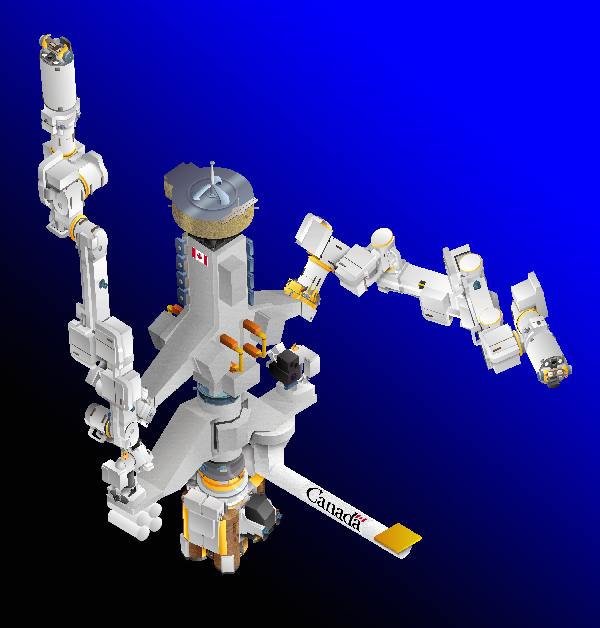
Для того, чтобы обслуживать такую систему, как CanadArm2, которая по сути представляет собой сложнейший робототехнический комплекс, привычного нам манипулятора было бы явно недостаточно. Чтобы решить множество проблем технического характера канадцами была разработана оригинальная конструкция, похожая на безголового (чуть не сказал “безбашенного”) робота с двумя руками-манипуляторами, каждая из которых состоит из 7 “суставов”. Собственно, само название Dextre происходит от английского dexterity — гибкость, ловкость, проворство.

Данное устройство было разработано компанией MDA Space Missions (подразделение MacDonald Dettwiler) по контракту с Канадским космическим агентством. Поскольку во время работ над Dextre возникли проблемы с телескопом Hubble американцы поначалу собирались использовать именно его для ремонта сложной оптической аппаратуры. Однако, из-за задержек с проверками миссию отменили.
В июне 2007 года Dextre был доставлен в Космический центр Кеннеди, где после предполётной проверки его загрузили в Space Shuttle и 11 марта 2008 года отправили на МКС. Свое первое задание он выполнил только 4 февраля 2011 года – манипулятору поручили провести распаковку двух частей японского автоматического грузового корабля Kounotori 2. Интересно, что экипаж МКС во время работ ещё спал и всё происходило в автоматическом режиме.