 Данный рассказ задумывался для публикации несколько позднее, но раз уж у нас на дворе 12 апреля, то есть повод “отправить в печать” статью несколько ранее.
Данный рассказ задумывался для публикации несколько позднее, но раз уж у нас на дворе 12 апреля, то есть повод “отправить в печать” статью несколько ранее.
Тема освоения Луны, в том числе и в фантастическом аспекте, проходила у нас далеко не один раз.
Про космические корабли статьи были, а вот про луноходы – практически нет.
Восполняем этот пробел кратким экскурсом в историю мирового “луноходостроения”, а также немного заглянем в будущее.
Если верить официальным источникам NASA и Роскосмоса освоение Луны никто не собирался забрасывать. Скорее наоборот – началась новая “Лунная гонка”.
Правда, если в 1960-1970-х гг. на карту был поставлен престиж страны, то теперь дело скорее в чисто меркантильных интересах.
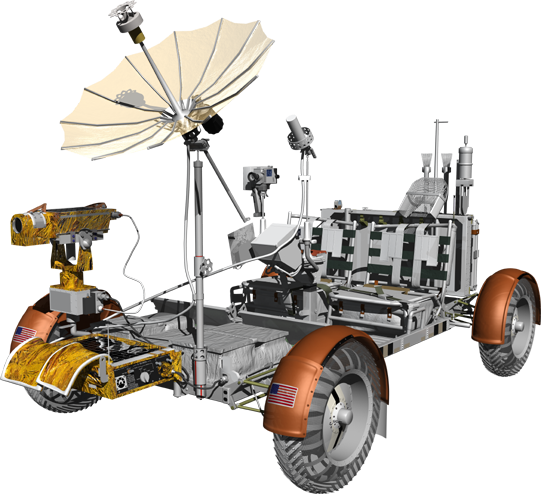
Apollo Lunar Rover.
Этого “товарища”, безусловно, знаю все. Три успешные экспедиции на Луну с 1967 по 1972 год доказали надежность этой машины. Правда, дальность её хода оказалась минимальной и по лунной поверхности все три ровера “накатали” только 17,1 км на всех…
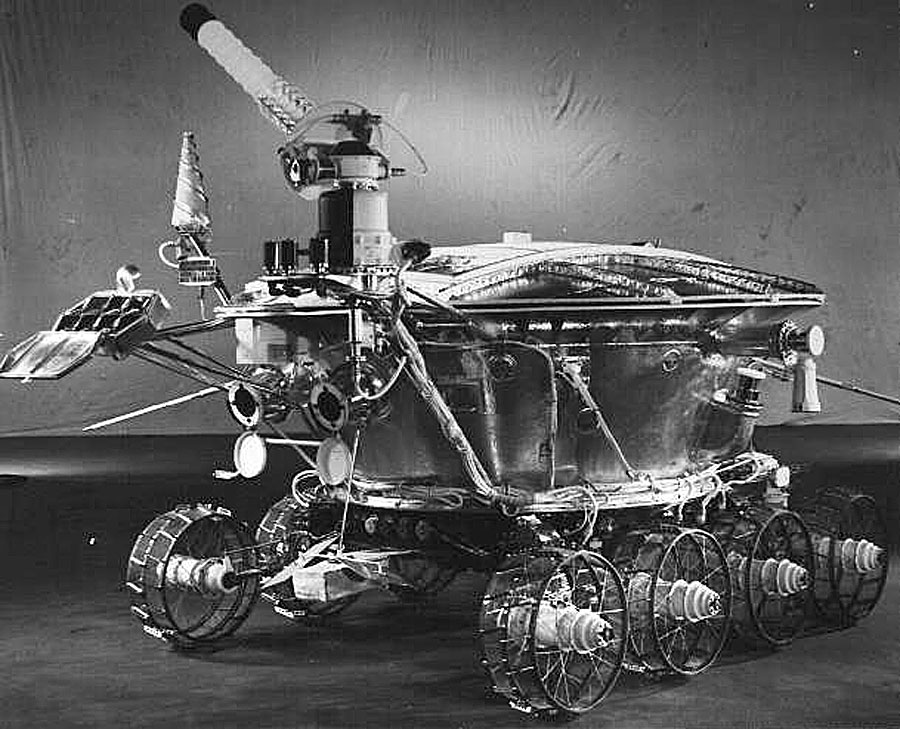
“Луноход-1″ и “Луноход-2″.
Коротко – о главном.
“Луноход-1″ – был доставлен на поверхность Луны 17 ноября 1970 года советской межпланетной станцией «Луна-17» и проработал на её поверхности до 14 сентября 1971 года, когда связь с ним была потеряна.
“Луноход-2″ – доставлен на Луну 15 января 1973 года автоматической межпланетной станцией Луна-21. Официально работа прекращена 4 июня 1973 года, после прекращения радиосвязи.
Обнаружить “Луноход-1″ удалось лишь весной 2010 года и сделали это благодаря установленному на борту отражателю, с помощью которого ученые определяют точное расстояние от Земли до Луны. Сам поиск начали американцы ещё в 2007 году, но только получения снимков от Lunar Reconnaissance Orbiter (LRO) удалось точно установить место “гибели” советского аппарата (вообще, если зарядить батареи и провести текущий ремонт “Лунохода-1″, его ещё можно использовать по назначению). Американский зонд сфотографировал участки местности, где находились “Луноход-1″ и “Луноход-2″, однако положение второго советского аппарата не подошло ученым. А вот на уголковый отражатель “Лунохода-1″ они сумели послать луч лазера и зафиксировать отраженный луч на Земле.
Между тем, еще в 2007 году канадский ученый Фил Стук объявил, что обнаружил на снимках Луны советский “Луноход-2″, найти который не удавалось 37 лет. Профессор использовал новые снимки Луны, сделанные NASA, а также карты из опубликованного им в 2007 году справочника “Международный атлас исследований Луны”. По его оценкам “Луноход-2″ прошел расстояние в 37 км, с чем не согласились российские ученые. Согласно уточненным данным, которые представил заведующий лабораторией сравнительной планетологии Института геохимии и аналитической химии имени Вернадского (ГЕОХИ) Александр Базилевский, первыми действительное положение “Лунохода-2″ определили сотрудники Института астрономии Харьковского университета Вадим Кайдаш и Сергей Герасименко.

Китайский луноход – вариант 1.
Аппарат, пока еще не получивший официального названия, разрабатывался в Шанхайской академии космических технологий в течение последних трех лет. Инвестиции в проект не раскрываются.
Луноход сможет путешествовать по поверхности Луны со средней скоростью 100 м/час. Его высота составит 1,5 м, а весить он будет 200 кг. Аппарат будет передавать видео в режиме реального времени, делать трехмерные снимки, а также анализировать образцы грунта.
Инженеры говорят, что луноход может подниматься на возвышенности и благодаря встроенным сенсорам избегать столкновения с препятствиями.

Китайский луноход – вариант 2.
Ещё один аппарат аналогичного назначения. Впервые был представлен на выставке в Шанхае весной 2011 года. Китайская версия реголитопроходца представляет собой шестиколёсный аппарат весом около 140 кг, оборудованный 3D-видеокамерой, рентгеновским и инфракрасным спектрометрами и прочими приборами. Основное питание — от солнечных батарей; дополнительным источником послужит радиоизотопный генератор, работающий на плутонии-238. Проектная скорость перемещения лунохода — около 0,1 км/ч.
Высадка лунохода планируется к 2013 году.
Источник: kosmos.of.by

Lunar Electric Rover (LER).
Эта машина именуется не иначе как “лунный супервездеход”! Разработка лунохода началась в 2007 году и спустя три года на испытания вышел первый опытный образец. Машина массой 4 тонны имеет двигатель мощностью 20 лошадиных сил и может подниматься по 30° склонам, а также преодолевать препятствия в виде камней метровой высоты. 12 колёс приводятся в движение двумя электрическими моторами и вращаются на 360°. Используемые в транспортном средстве аккумуляторы не отличаются от тех, что установлены на электромобилях. В настоящий момент применяются литий-ионные батареи ёмкостью 125 Втч на 1 кг, а окончательный вариант ровера потребует 200 Втч/кг.
Отправить его на Луну планируют в 2020 году.
Источник: nikogiant.ucoz.ru – Испытан LER – лунный супервездеход.
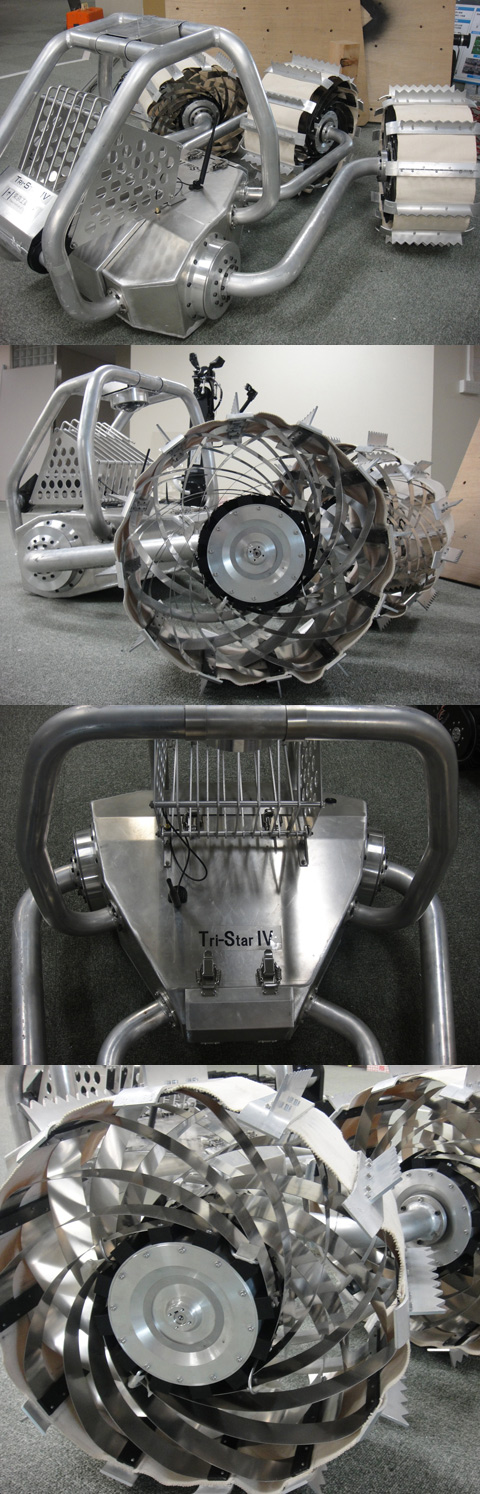
Tri-Star IV.
В мае прошлого года японское аэрокосмическое агентство JAXA приступило к реализации амбициозной программы по освоению Луны стоимостью 2,2 миллиарда долларов, итогом которой должна стать отправка к 2015 году на естественный спутник Земли партии человекоподобных роботов.
Эти 300-килограммовые махины на гусеничном ходу будут оборудованы солнечными батареями, сейсмографами, телекамерами высокого разрешения и прочими научными приборами. Роботов снабдят электронными руками для сбора образцов грунта, которые потом отправятся на Землю. И хотя они будут находиться под дистанционным контролем ученых, собственный искусственный интеллект роботов позволит им принимать самостоятельные тактические решения и действовать в режиме высокой степени автономии.
По замыслу разработчиков проекта, эти андроиды к 2020 году возведут базу у южного полюса Луны, в которой и будут “обитать”. Она должна станет форпостом для колонизации спутника Земли роботами, а потом, возможно, и жителями Земли.
Источник: сайт ligaspace.my1.ru – Освоение Луны.


ATHLETE (All-Terrain Hex-Limbed Extra-Terrestrial Explorer).
Луноход разработан в 2009 году и состоит из трех прикрепленных к грузовой платформе независимых частей, каждая из которых выглядит как две конечности, на которых находится по колесу. Все три части могут выполнять некоторый объем работ самостоятельно, а при подсоединении к грузовой платформе функционируют как единое целое. Высота аппарата, стоящего на вытянутых “ногах”, составляет четыре метра, а грузоподъемность – 450 килограммов в условиях земной гравитации. Специалисты планируют, что итоговый вариант будет вдвое выше. Максимальная скорость передвижения ATHLETE равна двум километрам в час. Первый прототип ATHLETE, созданный в 2005 году, представлял собой шесть “ног” с колесами, которые были прикреплены к прямоугольной платформе. Его высота составляла всего два метра, а грузоподъемность на Земле – 300 килограммов.
Источник: kosmos.of.by
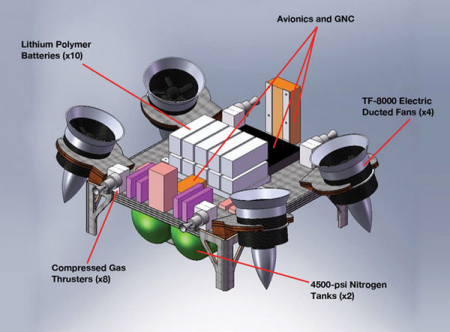
Talaris (Terrestrial Autonomous Lunar Reduced Gravity System).
Необычный луноход был предложен американскими специалистами – у него совершенно отсутствуют колеса или гусеницы. Почему? Давайте вспомним, что остановка программ советских “Луноходов” была связана как-раз с особенностями рельефа местности, да и современные марсоходы тоже не отличаются высокой проходимостью. Вот и решили пойти от обратного.
Прототип аппарата под названием Talaris оборудован сразу двумя силовыми установками. Тяговые ракетные двигатели на сжатом азоте обеспечивают собственно подпрыгивающее передвижение, а четыре винтовых электродвигателя, питающиеся от литий-полимерных батарей, нужны для имитации сравнительно невысокой гравитации Луны или Марса в земных условиях. Натурные испытания устройства намечены на апрель. Одной из его главных проблем является дефицит топлива – ведь действующие планетоходы используют для движения “бесконечную” солнечную энергию. Поэтому инженеры мечтают в будущем привлекать ресурсы исследуемых планет. В любом случае, если закончится топливо, можно перевести аппарат в “сидячий” режим работы, рассказывает ведущий технический специалист проекта Бобби Коэним.
Источник: kosmos.of.by