В течении 1960-х гг. американские специалисты различных фирм предлагали NASA самые невообразимые проекты транспортных средств для передвижения по Луне.
Впрочем, среди всего многообразия выделялось несколько вполне реалистичных разработок, которые были отклонены в пользу известного всем Lunar Roving Vehicle (LRV), разработанного совместными усилиями фирм General Motors и Boeing.

Предполагалось, что луноходы должны будут иметь более чем четыре колеса. Похожим путем пошли советские конструкторы, работавшие над проектами “Луноходов”. При некотором увеличении массы многоколесная схема обеспечивала меньшую нагрузку на грунт и более высокую грузоподъёмность.
Проект Grumman Dual Mode Rover, продемонстрированный в 1969 году, представлял собой шестиколёсную машину с тремя составными платформами, на которой крепилась каждая из осей. Как можно догадаться из названия лунохода, предусматривалось два варианта – управляемый астронавтами и беспилотный, на дистанционном управлении.

Преимущества второго варианта были очевидны – снижалась масса конструкции, что позволяло разместить больше научного оборудования и не требовало непосредственного участия человека при выполнении опасных миссий.
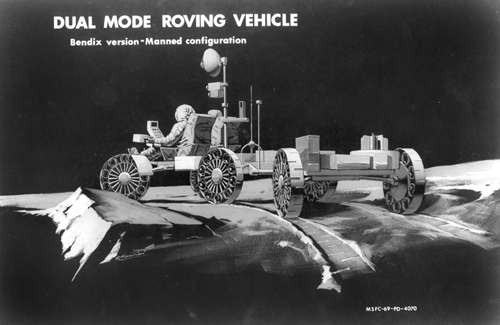
Второй разработкой аналогичного направления стал проект Bendix Dual Mode Rover разработанный специалистами одноименной фирмы . Как видим, от варианта фирмы Grumman он отличался весьма незначительно.
Чуть больше повезло фирме General Motors, чей Dual Mode Rover дошел до стадии опытного образца и даже начал проходить натурные испытания. Правда, пока только на полигоне.
Однако, все проекта были отклонены. Более простым и надежным тогда оказался тот самый LRV, кстати разработанный той же фирмой General Motors.